志存高远,追求卓越

高级会员——李智斌

一粟游沧海,
相宜自得惠。
个人简介
李智斌,男,1965年3月出生于四川巴中,博士,山东科技大学教授、博士生导师,系统科学与智能控制技术研究所所长,国家地方联合工程研究中心智能控制技术研究室主任,“复杂系统安全控制技术”全国高校黄大年式教师团队骨干成员。
主要研究领域为复杂系统动力学、智能自主控制、基于数字孪生的系统运维,目前侧重于面向智惠海洋的先进控制技术研究。
成长(教育)经历
1983年的中国刚刚迎来科学的春天不久,在大巴山区长大的高考生对大学还没有什么概念,因陈景润而家喻户晓的厦门大学便成为李智斌的志愿学校,并被控制理论专业录取,系主任正是陈景润和林群院士的恩师李文清先生。与控制论、信息论、系统论 (简称“三论”)相对应,计算机科学系下设控制理论、软件、系统工程三个专业。开学第一课,李先生阐述“先由薄到厚、再由厚到薄”的做学问方法,使李智斌深受启发,《数学分析》、《高等代数》均取得第一名成绩,打下扎实基础。
为了“先由薄到厚”,适逢“三论”同其它学科交叉发展的时代机遇,厦门大学具有多学科交叉的优势条件,李智斌作为筹备组骨干从1984年夏天就参与创办厦门大学学生软科学社的策划工作, 11月24日在映雪(二)召开成立大会,来自10多个系的首批社员41人涵盖四个本科年级和部分研究生。1985年春夏之交,软科学社理事长刘少华同学从收音机听到钱伟长教授应厦门市政府邀请来厦门指导工作,而这之前“三钱”刚刚参加全国交叉科学讨论会的新闻,给软科学社极大鼓舞。通过软科学社顾问毛涤生副市长预约,刘少华和李智斌在厦门宾馆得到钱先生亲切接见,一个多小时的交流中,钱先生充分肯定学生软科学社活动有利于学科交叉融合和未来发展战略,愉快接受软科学社顾问聘书并对学生学术交流等提出宝贵建议,他的和蔼可亲、睿智和博学让两位同学如沐春风。1985年6月2日,学术部长李智斌全程主持了在博学楼召开的厦门大学软科学社学术研讨会(图1),会议取得圆满成功,推动了软科学社同包含香港在内的高校学生学术社团之间的积极交流。
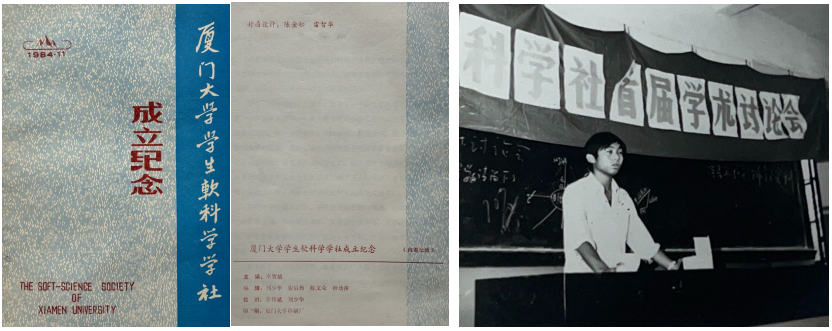
图1. 厦门大学学生软科学社-左:李智斌主编成立纪念册封面及封底 右:李智斌主持学术讨论会
立足计算机科学系三个专业的学习、多学科兼收并蓄,李智斌创办了《冲浪》期刊并担任总编,请有关学科名师为顾问,由每个班推荐一名同学组成编委,面向全校师生征稿和发行。通过多次深入采访李文清等顾问老师,李智斌开阔了视野,优化了方法,提高了能力。期刊顾问、银河-Ⅰ巨型机总负责人陈火旺教授参加厦门大学-国防科大学术交流会期间,也对《冲浪》编委会工作进行专门指导(图2)。
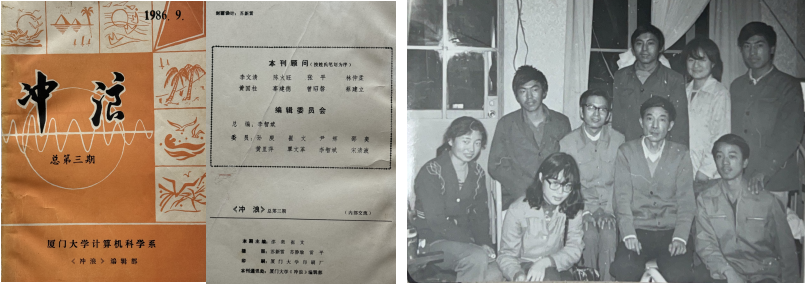
图2. 厦门大学《冲浪》期刊-左:第三期封面及封底 右:陈火旺院士与《冲浪》部分编委(前排右2陈火旺,后排右3李智斌)
李智斌在大二时就成为厦门市国际新科技与体制研究学会的学生会员并在全国一级刊物发表论文,结识了秘书长李茂青老师,感受到李老师的系统思维、务实作风与青春活力,因此本科毕业设计跟随李老师研究生产线流程优化技术,在厦门市企业得到实际应用。
硕士研究生期间,李智斌得到导师著名控制专家吴宏鑫研究员直接指导。吴老师即便在十年浩劫靠边站期间都从未放弃学习和研究,他发明的全系数自适应控制方法在学术界有很大影响。对李智斌来说,印象最深刻的就是吴老师说起李白诗句“长风破浪会有时,直挂云帆济沧海”时,那种不惧任何困难的豪迈。正是这种精神鼓舞,李智斌作为最早跟随吴老师研究特征模型智能自适应控制方法的学生,学位论文得到舒迪前、李清泉等答辩专家高度评价。
由于在针对空间机器人等复杂运动体的控制任务中,感到有关的力学特性分析至关重要,有幸同清华大学王照林教授合作并长期参加他主持的力学讨论班。王老师将分析力学与控制紧密结合,早年在莫斯科大学师从运动稳定性著名学者鲁米采夫。李智斌在王照林、李俊峰教授联合指导下攻读博士学位期间,有机会听到杨卫院士(图4)等著名学者的系列教学课,完成的博士论文“刚-柔-控耦合系统动态特性分析及其实验研究” 得到陈斌、吴宏鑫(图3)等答辩专家高度评价。基于博士论文基础,李智斌获得他的第一个国家基金资助项目“刚-柔-控耦合系统几何非线性动力学、控制及实验”。
图3. 博士论文评审专家吴宏鑫院士同李智斌合影;图4. 系主任杨卫院士在博士学位授予典礼同李智斌合影
科研(工作)经历
李智斌曾先后在被分配到北京控制工程研究所(BICE)和中国科学院光电研究院工作,2019年11月被引进到山东科技大学。最初被分配到BICE时,得知研究所前身为1956年10月成立的中国科学院自动化研究所,而钱伟长教授就是第一任所长,他回想起在厦门宾馆见到钱先生的情景就感到特别温暖。这应该是李智斌在大学同班同学中目前仍然从事自动化方向研究与教学工作的重要原因。主要科研经历概括如下六个方面。
(1)机器人技术研究。首先被安排在空间机器人工程组,侧重进行挠性机械臂动力学、控制及仿真研究,通过同清华大学王照林教授、哈尔滨工业大学刘暾教授合作中得到系统性收获,李智斌在BSR-1机器人上实现了有效的轨迹规划控制,在AMSE建模仿真与控制会议MSC’92发表23页的长文。同时他还进行了工业机器人可靠性调研和机器人操作巡回演示培训。
(2)智能自适应控制方法及其应用研究。随后相当长时间在智能自适应控制工程组工作,在吴宏鑫老师督导下,李智斌针对不同阶次和阻尼、增益上万倍大范围变化的被控对象,熟练掌握其相应的动、静态特性,基于全系数关系和规范化处理方法,通过灵活利用估计参数,提出一种过渡过程高性能的自适应控制方法,在满足一定稳态性能的同时,具有显著的过渡过程性能,得到屠善澄、陈宗基、蔡季冰等多位权威专家高度评价。进一步,在国内较早开展交会对接(RVD)及空间站控制技术研究,提出基于四光点成像算法的RVD测控闭环系统方案和两阶段控制算法,在深度调研美、苏空间站制导导航控制(GNC)系统发展的基础上,提出中国空间站GNC系统方案建议和智能自主控制策略。
(3)智能控制实验平台系统研究。在BICE工作的一个极大优势,就是能够长期参加吴宏鑫老师主持的研究生讨论班,经常聆听杨嘉墀院士、屠善澄院士的热情指导,正是在讨论班上,杨先生最早提出了中国发展空间智能自主控制的四个依据,然后在IFAC会议公开发表。为了将不同方法针对变结构变参数对象的控制效果进行客观比较,需要研制一套全物理实验系统,吴宏鑫老师责成李智斌主持这项工作。为了模拟微重力环境,在采用气浮轴承浮起变结构变参数运动体基本方案的前提下,从做学问“再由厚到薄”的角度,李智斌对运动体的组成进行了深度剖析,认为服务于具体用户的运动体,一般包括三个层面:①物质材料与机体结构;②能量供配与推进驱动;③信息处理与任务实现。进一步,针对国内外同类全物理实验系统的局限性进行大胆攻关,实现了进行完全无人自主控制比较的实验水平(图5)。最后对智能自适应、变结构、模糊及PID等多种控制方法进行客观比较,通过了以涂序彦教授为组长的测试和戴汝为院士为鉴定委员会主任的成果鉴定。

图5. 一类自主控制的空间变结构变参数运动体全物理实验系统
(4)故障诊断与容错控制技术研究。作为空间智能控制技术国家级重点实验室的重要组成,李智斌主持研制了故障模拟、诊断与容错控制实验系统(图6),包括带故障注入和模拟功能的实时通用仿真平台、故障诊断和容错控制策略开放式研究平台、控制系统实物系统,并具有对实际运行系统进行实时故障诊断的扩展功能。主持完成国基面上项目“基于多特征模型的非线性系统容错控制方法及实验研究”。
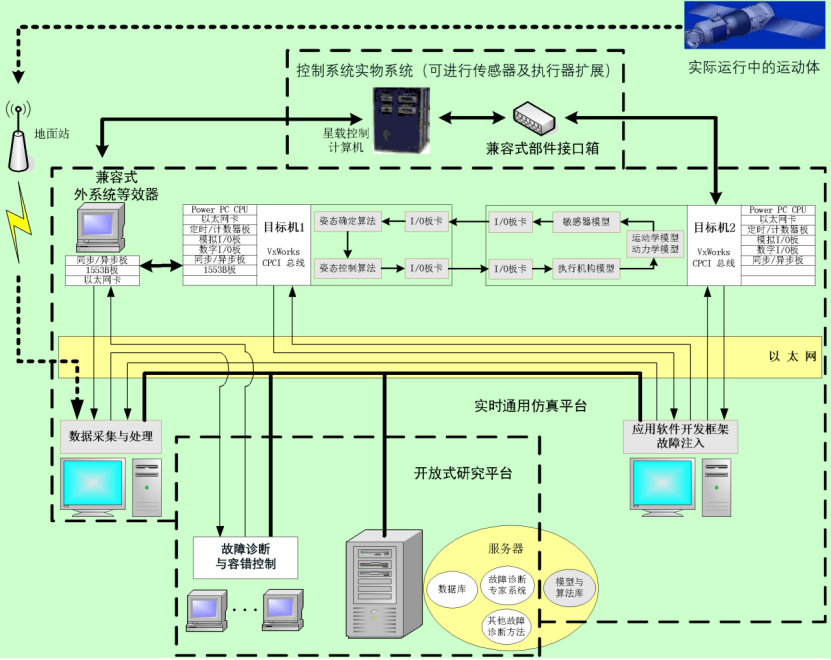
图6. 故障诊断与容错实验系统
(5)临近空间平台控制技术研究。①高动态的平台方面,作为主要成员完成基金委重大研究计划培育项目和重大项目,为了将基于特征模型的自适应控制设计应用到某高超声速飞行器仿真验证中,针对从爬升段切换到再入段时,控制器切换引起攻角跳变的问题,设计了二级跟踪曲线,实现了无跳变攻角跟踪控制。②低动态轻于空气(LTA)平台方面,因其不必像应用卫星那样受过顶弧段短的约束、所以有望实现在地面热点区域的上空持续驻留并具有更高的分辨率,也不必像常规空基平台那样难以持续驻留、服务范围小、续航时间短,在类似汶川地震应急救援等众多场景将大有可为,为此成为包括我国高分重大专项在内的国际先进技术国家发展的目标,但是由于受到环境风场等外部干扰,崔尔杰院士认为其控制比高动态平台更具挑战性,吴宏鑫院士认为因其很重要、要迎难而上。李智斌及团队自2005年开始致力于该方向发展研究,作为中国空间技术研究院学术技术带头人进行高分重大专项平流层飞艇导航与控制技术论证,开展自主研发探索,先后主持完成基金委项目“平流层飞艇上升/下降阶段大范围变参数耦合动力学与协调控制”及“高空长航时定点飞艇基于特征模型的鲁棒自适应控制”,并研制了低空验证平台进行一定程度的飞行控制技术实验验证(图7左)。
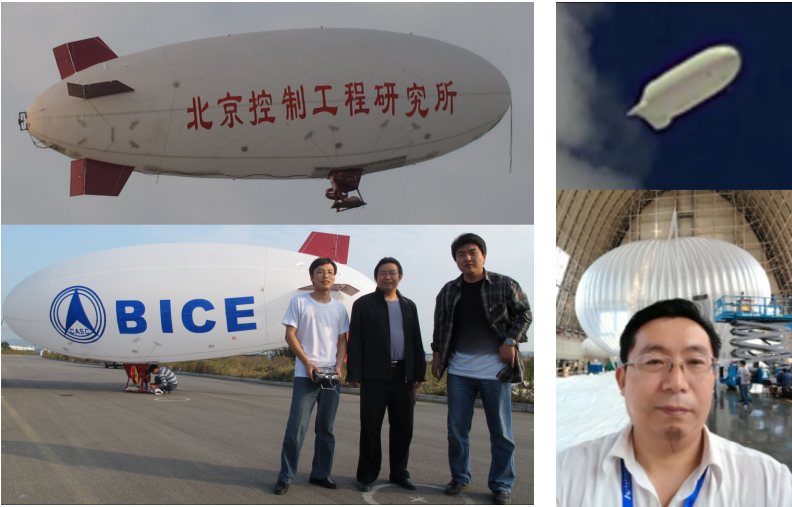
图7. LTA平台实验故障-左:低空验证平台放飞前及飞行中 右-临近空间平台调试中及飞行中
2017年3月,李智斌成为中国科学院浮空器系统研究发展中心控制与电子学方向学术带头人,主持基金委重大项目“平流层可重复使用长航时飞艇综合建模与优化协调控制”研究和中国科学院临近空间科学实验系统飞行任务辅助决策分系统研制,带领团队发明了强风场扰动影响下临近空间持久驻空浮空器控制优化设计方法、辅助决策规划方法,2022年成功应用到我国平流层飞艇全过程规划与控制,连续驻空飞行时间达42天、获得世界第一幅平流层艇载高分辨率遥感图像并顺利返回,在全球率先实现可复用临空飞艇跨月级驻空(图7右,而国外最近披露的平流层飞艇最长飞行时间才十多个小时),得到吴宏鑫院士、段广仁院士等十一名鉴定专家的高度评价。
(6)面向智慧海洋的先进控制技术研究。
山东是海洋大省,将先进控制技术同智慧海洋建设相结合,有许多新的机会和挑战。针对现有信息传输技术难以满足智慧海洋海量信息传输的需求,李智斌团队主张将无线信道传输同空天信息平台结合起来,对有关控制进行初步实验室研究(图8),提出区域联合重点基金项目指南建议并获得资助,于2023年12月召开项目启动会和高端学术研讨(图9)。

图8. 同团队师生在实验室讨论;图9. 区域联合重点项目启动和高端研讨会
为了同实际海洋场景结合起来开展实验验证,他来到西海岸灵山岛进行了实地考察 (图10左),并到中国北方海洋种业基地莱州现代渔业产业园进行现场调研 (图10右),了解实际需求,讨论示范合作的可行性。

图10. 左:海洋实验场景考察 右:海洋牧场调研
CAA情结
李智斌2002年就成为CAA专业委员会委员,2018年以来为CAA高级会员。自90年代以来,他及团队人员每年都参加多次中国自动化学会及其分支机构的学术会议,通过互相交流了解学术动态和发展趋势,1999年在中国智能自动化年会获得钟士模奖(获奖论文“航天器智能控制实验平台”)。他连续多年在中国控制会议组织临近空间平台建模与控制邀请组(图11)。

图11. CCC邀请组主席证书
先后将CAA两个分支机构学术会议成功办成有IEEE国际会议:2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes( CAA SAFEPROCESS 2019,李智斌担任程序委员会主席,图12)、The 2023 Conference on Fully Actuated System Theory and Applications (FASTA 2023,李智斌担任程序委员会秘书长及共同出版主席)。2021年10月16日,他在2021中国自动化大会Workshop自主导航与安全控制系统上汇报研究成果(图13)。
图12. 在 CAA SAFEPROCESS 2019主持杨嘉墀院士百年诞辰纪念环节 图13. 在2021中国自动化大会Workshop作报告
人生信条
一句话座右铭:一粟游沧海,相宜自得惠。
每个人都是沧海一粟,一粟是主体,沧海是主体的客体-相逢的人群、事件与环境,“游”可以是长风破浪、直挂云帆、动态适应、随遇而安。人类在适应自然的过程中循序渐进地发展群体,很大程度上是借助于不断地利用工具,工具的本质是人类主体的延伸,而智能自动化就是工具延伸发展的方向。“人法地,地法天,天法道,道法自然”,在前面应加一句“工具法人”,按照吴宏鑫院士的话说,自动化不是让人失去工作的机会,而是让人更加快乐健康安全地工作。人工智慧,更应该叫做“人恭智惠”,“惠”及人类,先得“恭”敬自然,相宜自得惠。
新闻来源:https://mp.weixin.qq.com/s/U1gJa6YKbWHYssYEtbxjUQ